Behavior of a Reduced-Scale Robotic Arm Manipulator under Microgravity Conditions (DropTES 2016)
research area: technology tests
experiment title:
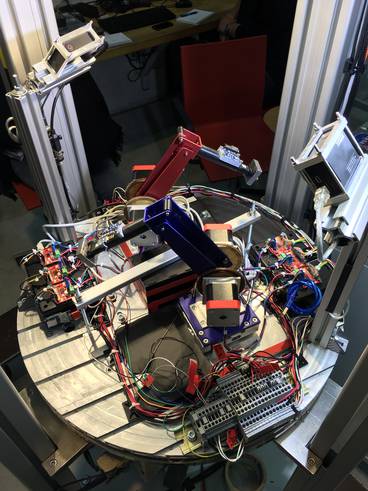
Behavior of a Reduced-Scale Robotic Arm Manipulator under Microgravity Conditions
experiment acronym: DropTES
funding agency:
United Nations / DLR / ZARM
grant number:
DropTES - Program
performing organization:
Instituto Tecnológico de Costa Rica (ITCR) / Universidad de Costa Rica (UCR), Costa Rica
prime investigator:
Prof. Renato Rimolo-Donadio
(Nicole Chaves Jiménez, Ernesto Corrales Corrales, Moacir Fonseca Becker, Carlos Mayorga Espinoza)
experiment objective
abstract
Robots are a crucial part of human's future deep space exploration missions. A component of the systems that will be part of these missions are articulated manipulators or robotic arms. The general objective of this project is to expand the technical knowledge and information available on the behavior of space robotic manipulator systems in a reduced gravity environment. This will be achieved by studying the effect of the Coriolis/centripetal forces on a reduced-scale robotic arm, which would be used in a non-inertial, rotating frame of reference; as would be the case for a rotating space station or rotating spacecraft.
For future space exploration it is necessary to conduct studies on how humans, space systems, and technology will react to reduced gravity (for instance, Lunar and Martian gravity) environments. Currently, not much data or research on the response of certain equipment and systems to artificial gravity (spin gravity) systems can be found, and this might be attributed to the difficulties of creating such kind of test conditions. It is important therefore to evaluate system behavior in reduced gravity, as Gary P. Noyes stated on his Variable Gravity Laboratory for Deep-Space Crewed Missions Research and Demonstration (July 2011): "Before humans embark on deep-Space missions, with long-duration transit times and long-duration surface habitation, all transit spacecraft and surface habitation systems must be flight qualified “in a relevant environment”. While microgravity-compatible systems can be flight qualified by demonstration on the International Space Station (ISS), gravity-enabled systems intended for use on Luna or Mars must be flight qualified at the gravity level of Luna or Mars. So for a system, as mentioned above, it is important to be sensed in different microgravity environments. This to make it even more stable when it is used in environments that have never before been tested.”
"One of the most important research areas in space robotics is dynamics, control, motion and planning for space robots by considering the dynamic interaction between the robot and the base (space station, space shuttle, or satellite). Due to the dynamic interaction, the motion of space robots can alter the base trajectory. This mutual dependence severely affects the performance of both the robot and the base, any inefficiency in the planning and control can considerably risk the success of the space mission." (Space Robotics: Dynamics and Control, Yangsheng Xu ,1993)
From the information available at ZARM's Website, regarding the experiments that have been conducted at the drop tower, no investigations in the area of aerospace robotics with reduced gravity environments have been found. So this experiment would be a pioneering opportunity at the tower in this field of study. And hence this research could inspire and motivate other students, investigators or institutions interested in conducting research in this space related area of study at the University's facilities. Our experiment can provide a technical-scientific basis, for further research not only to be developed in the Bremen Drop Tower; besides this experiment can be a knowledge base for control, robotics and other laboratories in the world.
Some of the expected results of the reduced gravity experiment are:
- Less reaction forces/torque on the joints of the arm in all six axis, except for the components of this reactions which are in the direction of Coriolis and centripetal forces.
- Increase of the oscillations/vibrations of the system and the direction of Coriolis forces. Hence if this is the case, it is important to take into account this perturbations in the system, and look for ways of dampening the oscillations.
All of the team members are studying on STEM related fields. From electronics, electrical engineering, physics, mechanical engineering, and MEM's. This experiment requires and interdisciplinary approach in order to have a better and integral evaluation of the experiment. Hence, the necessity of students and researchers from diverse areas in this project. Also, a very important point is that the project will be developed with members of the two major public universities in our country (Instituto Tecnológico de Costa Rica & Universidad de Costa Rica), thereby strengthening the ties of cooperation between them.
experiment campaigns
experiment year: 2016
number of drops: 4
